
Kini is our new home safety device, intended to keep children and others away from dangerous items in a household. It also is a good way to protect valuables and private items from nosy houseguests, house sitters and visiting workers.

Kini was designed to be “set-and-forget“. We wanted our users to set it up, place it where they want monitoring, and then have little need to go revisit the Kini. And we think we have succeeded! With typical use, Kini should stay powered for over a year with one charge, and by utilizing the most power saving settings, it won’t need a charge for quite a bit more than that!
Just how did we do that? It took quite a bit of effort, and it required deliberate actions at many points throughout the design and development. The first step was to set the goal to be electron-frugal on day one. This was not going to be a product that would be plugged in while operating. We also wanted to avoid discovery of the “protected assets” due to repeated access for charging.
With that goal, we first looked at the possibility of using the low power or deep-sleep mode of the chips used in order to keep power use to a minimum during the long stretches of monitoring. We’d then wake the chip up or go to normal power mode when an alert needed to be sent out. But we quickly realized that we needed more drastic measures, since the lowest power consumption mode of some of our chips used over 10mAh. That would drain over 240mA per day and would deplete a 1000mAh battery in less than 5 days. We needed a 50x reduction in current consumption or more!
We decided to split the circuit into two parts: one part that absolutely needed to be powered constantly, and another that could be kept completely cut off from power for the majority of the time. There were two areas that had to be powered continuously: monitoring for movement, and counting seconds (keeping time). The former doesn’t need explaining. The latter was needed because we wanted Kini to report its status every so often – this was so that a user could be warnedif a Kini was somehow disconnected, destroyed, or having network trouble. The periodic reporting is set to once every 2 hours, but users can change that to report more or less often.
Not All Accelerometers Sip Power
We experimented with more than a dozen accelerometers, some which included gyroscopes and some which had magnetometers too. These devices are a type of Micro-Electro-Mechanical Systems (MEMS) that can detect movement, acceleration, velocity, and positioning. A few are well-known industry standards that are very commonly used. However; whereas millions of these are used in refrigerator doors, car alarms, and numerous other products, most have no need to save power since those products have much more electric power readily available to them. Others are somewhat more specialized and are meant for limited power devices, like smart phones.
Our needs were even more stringent that a smart phone since, unlike smartphones, we didn’t want a daily or weekly charge requirement. The first few chips we tried were rejected due to their power guzzling. Next, we pretty much ruled out any chip that had a gyroscope or a magnetometer.
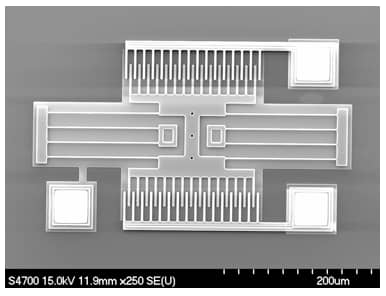
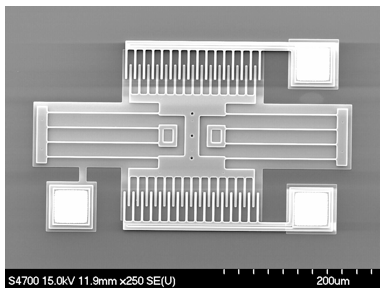
To very simply explain how gyro and accelerometer chips work, imagine two combs lying flat, facing each other, and with their tines intertwined. There is usually a pair of these for each x, y and z axis. With a gyroscope, the tines are vibrated continuously with piezoelectric or electrostatic excitation, which requires power. Movement is sensed when one of these combs experiences a force perpendicular to the direction of vibration when angular velocity is applied.
An accelerometer MEMS can similarly have the same two combs, but they’re not vibrating. There is little power being expended while the device sits there. When there is acceleration, those tines’ electrical characteristics change as the acceleration moves the tines with respect to each other.
By the way, they really are comb-like:
{kind=link}
We were finally down to a handful of chips and we picked a few with the lowest power consumption, leaning towards those that had the most configurable thresholds, so that we could always pick less or more sensitive settings at the cost of using a different amount of power. We figured that while most users would use our chosen movement thresholds, some may wish to set their Kinis to have custom sensitivity to motion.
We settled on three chips that were very close in power consumption, and designed for the one that was in abundant supply – when we first started the Kini project, the supply was non-existent for many of these chips. (We got lucky one day and managed to procure all 28,000 available units – worldwide – at the only vendor that had just gotten a new supply).
That chip uses 2µAmps at its least sensitive settings, and 15µAmps at more precise settings.
Timers
 We had an easier time with Timers. They’ve been around for many decades — unlike MEMS
We had an easier time with Timers. They’ve been around for many decades — unlike MEMS which only relatively recently got so miniaturized and designed into commodity products. We did have to worry about not just the timer, but the crystal, whose regular periodic vibrations would instruct the timer chip to count in a precise manner. We only really had to try out two different timers to realize that it was easy to find a timer, paired with a crystal, that drew under 1µAmps!
which only relatively recently got so miniaturized and designed into commodity products. We did have to worry about not just the timer, but the crystal, whose regular periodic vibrations would instruct the timer chip to count in a precise manner. We only really had to try out two different timers to realize that it was easy to find a timer, paired with a crystal, that drew under 1µAmps!
Voltage Regulators
In order to be able to have two independently powered areas on our boards, we made two power busses. Each power bus would need its own voltage regulator. One of those would be on all the time, since it would power the accelerometer and the timer. Each would have to be well matched to the current that it would need to provide, since in addition to the power a voltage regulator has to regulate, it will use a fraction to power itself (and turn into heat). At design time we were scrambling since the supply of voltage regulators that were efficient and small, was constrained. We needed one regulator that could handle small milliamps of current with very little heat dissipation. For the rest of the board, we needed a larger regulator that could handle hundreds of milliamps. Efficiency there would be less important since that regulator and its bus would be off 99%+ of the time.
Measuring and Validating Our Guesstimates
Design calculations don’t always match real-world measurements. We prototyped every one of the chips mentioned above, and measured the actual power usage.
Here’s what our measurements look like for when just the voltage regulators are operating, and all other chips being in dormant mode. This is the mode the Kini is in when it is shipped out to users, or when the users “turn it off”.

Constant 1.66µA
At a constant 1.66µA, this virtually “powered off” Kini will use 14.5mA over the course of a year. With a battery that has a capacity of 1000mAH, that Kini will not need to be recharged for decades! (Of course, batteries do dissipate power over time and to be safe we assumed in our calculations that typical batteries may lose some 20% of their charge over the course of a year.)
With only one bus on, powering the MEMS and the timer, the profile looked like this:

Constant 4.25µA
Not bad! Of course, 4.25µA is one of best-case scenarios, and that number can actually be closer to 8 or 9µA once we tune the MES to be just the right sensitivity for our needs.
On the other bus, things are quite a bit more extravagant. When that bus is powered, the main processor turns on and activates a number of circuits, including its radio transceiver for doing WiFi. This is what that profile looks like:
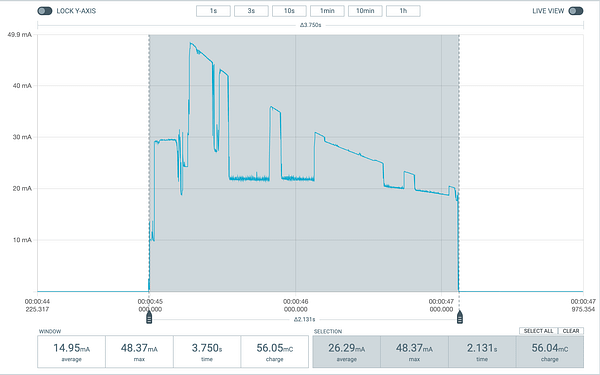
26mA over 2.1 seconds (the first ~1.5 seconds is connecting to the WiFi)
The big hit here is that just starting up WiFi and letting it connect to an access point can take 2-5 seconds, and that is a big drain on the power usage. This is where we try to optimize by saving some WiFi info to help us make the next connection faster, and doing our network transactions very quickly.
Of course, there are times when we do some local processing where we don’t need to turn on the WiFi radio, and the processor uses less power:
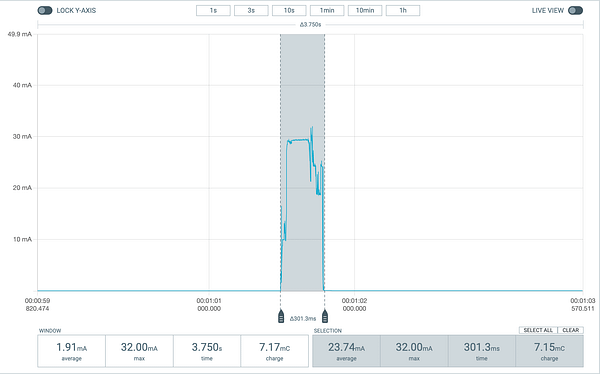
23.74 mA for only 301ms
Is It Getting Hot In Here?
We didn’t stop there. We coupled our current profiling with thermal imaging of the board. During prototyping, we eliminated components which put off too much heat – which is a waste of power.

Of course, we had to use multiple boards as reference since we didn’t want to base any decisions on a single chip’s outlier characteristics!
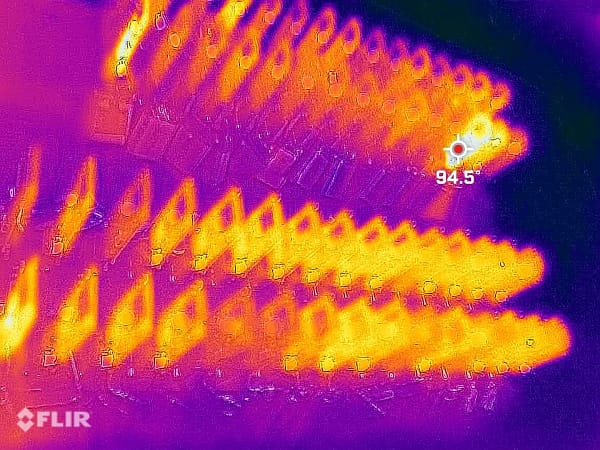
Later we used thermal imaging to change programmable parameters, such as sample and clock rates, so that we could have the same components, perform to our requirements, without wasting power:

Putting It All Together
The biggest power savings came from software fine-tuning of the hardware. One was fortuitously made possible by the selection of the right hardware. In order for Kini’s connections to our cloud server to be secure, we needed to have the correct time to use for the securing of those packets. However, getting network time can take many seconds. These are seconds where the processor would have to sit idly, using power, with the WiFI radio on, waiting for the time request to complete. We needed a way to maintain our own clock so we wouldn’t have to get the current time with every wakeup. Well, thankfully, our timer chip also happens to be a real-time clock! Once set, we can completely avoid the time query delay, saving us precious seconds with each wakeup! This capability quite possibly reduced our power usage by over 30%.
Once we send our secure message to the cloud servers, the job isn’t over. Kini has to wait to get a confirmation – the shorter the wait, the less power is used. The server code has to operate with the same sense of urgency; it has to do as much is it needs to, including sending off the SMS request message to a cellular carrier, and return a success or failure to the Kini. Any housekeeping that the server needs to do can happen after it has returned a response to the Kini. If the Kini gets a failure message, it queues the alert, goes to sleep, and reawakens after incremental periods and retries.
Kini’s in Charge
As you can see, much effort was expended to ensure that Kini could run for a long time between charges. While we officially state that the Kini can be set up to only need recharging once a year, we dare say that you’ll probably charge it less often than that!
Users can change some of the Kini’s settings and and some of those will make Kini use more or less power. For example, having the Kini contact our cloud servers every 15 minutes versus the default of every 2 hours, will increase the need for recharging. Kini ships with the center LED set to illuminate when a movement happens. Users may turn this off to keep the Kini stealthy, and with it will come a decrease in the need for recharging.
Optimizing battery usage and reducing the need to recharge can lead to longer battery life, as these lithium rechargeable batteries last much longer if they’re not being charged/cycled very often. In fact, we’re pretty confident that the batteries in this device will outlast most of our phones and laptops.
And if you’re worried that with such long gaps between charges, you might lose track of time and forget to recharge your Kini, rest assured that Kini will text you when it needs a recharge!
Share:
Parenting Hacks: Keeping your Children Safe with Innovative Devices
Keep Your Family Safe: Extra Security Precautions for Your Gun Storage